This guide was written using values for the Floatwheel ADV/Pro(1)
If following with another board the values will most likely be incorrectUpdating Wiki for ADV2 in process.
If you have not updated the VESC firmware on your controller do so before setting up the motor
(DO NOT DO FOR ADV2; the firmware it downloads is not correct)Navigate to Firmware tab
Note that VESC Tool has detected Little_FOCer_v3 for your board
Rest your phone with VESC Tool near the controller box for good connection
Select Upload and wait while the Firmware uploadsOnce your firmware has been updated continue with motor setup
¶ Motor Setup Wizard

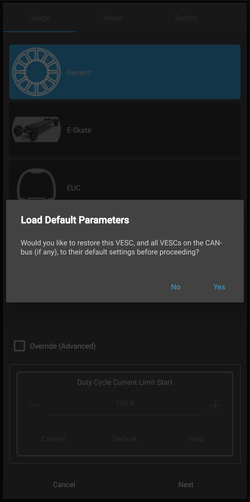
Select Yes on the Load Default Parameters prompt
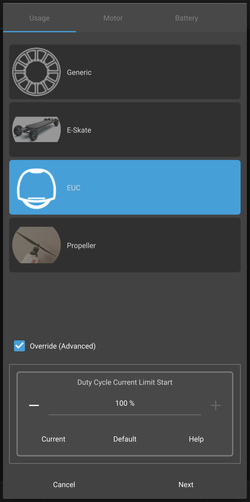
Select EUC
Check the "Override (Advanced)" box

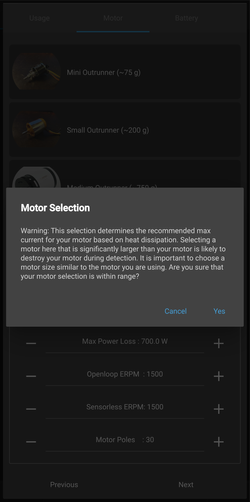
Select Large Outrunner
Check the "Override (Advanced)" boxFill in the following parameters:
- Max Power Loss:700.0 W
- Openloop ERPM:700(Leave at default, value unused due to sensors)
- Sensorless ERPM:1500
- Motor Poles:30Hit Next & Select "Yes" on the Motor Selection prompt
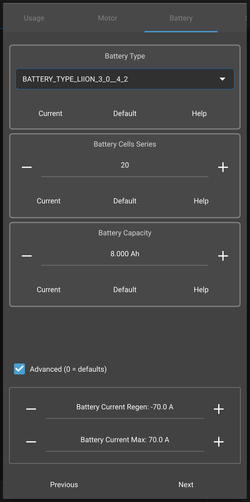
Fill in the following parameters:
- Battery Cells Series:20
- Battery Capacity: See Below
- Battery Current Regen:-70.0 A
- Battery Current Max:70.0 A
Battery Capacity is dependent on hardware:
8.0Ahfor the Standard battery pack
8.4Ahfor the Pro battery pack
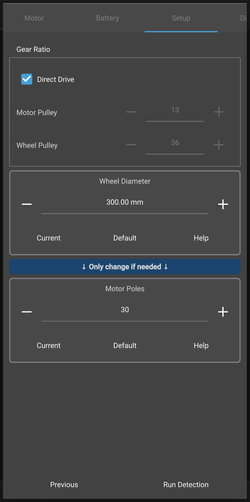
Select Direct Drive
Set Wheel Diameter:300.00 mmTony's Reccomendation
Measured Diameter of stock tire at 10 psi:292.8 mm
If you are using a different tire adjust as needed
This can be adjusted later in Motor Cfg -> Additional Info -> Setup
This will provide you with more accurate speed readings
Before Run Detection turn your board on to its side or in some other way retain the board so that the wheel can spin freely without catching or rubbing.
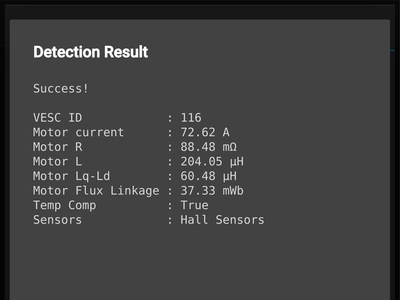
Detected values will vary.
Expected ranges are as follows:
Motor Current:~84 A(~74 A)
Motor R:55-75 mΩ(80-100 mΩ)
Motor L:~135 μH(~200 μH)
Motor Lq-Ld:~20 μH(~30 μH)
Motor Flux Linkage:~30 μH(~30-40 μH)
Temp Comp:True
Sensors:Hall Sensors
Numbers have been updated to reflect new batch of motors
Numbers in parenthesis are from Tony's video and apply to batch of first 200 motors
¶ Motor Config Setting Changes
Head over to the Motor Cfg header tab in the vesc tool app.
¶ Motor Cfg - General
Under General category there will be changes in the Current, Voltage, and Temperature sub pages
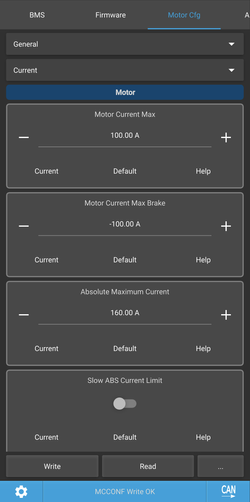
On the Current page set the following:
Motor Current Max:120.00 A
Motor Current Max Brake:-100.00 A
Absolute Maximum Current:180.00 A
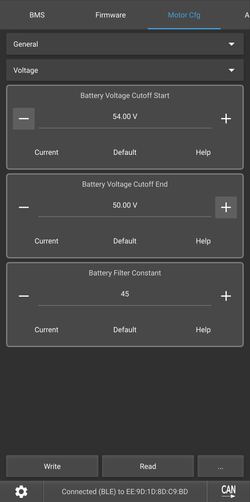
Write the settings to the boardOn the Voltage page set the following:
Battery Voltage Cuttoff Start:54.00 V
Battery Voltage Cuttoff End:50.00 V
Write the settings to the board
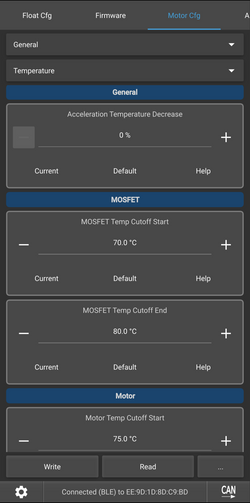
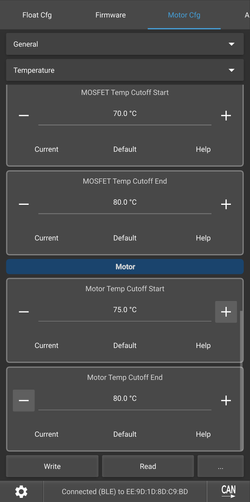
On the Temperature page set the following:
Acceleration Temperature Decrease:0 %
Motor Temp Cutoff Start:75.0 °C
Motor Temp Cutoff End:80.0 °C
Write the settings to the board
¶ Motor Cfg - FOC
Under FOC category there will be changes in the Hall Sensors, Offsets, Field Weakening and Advanced sub pages
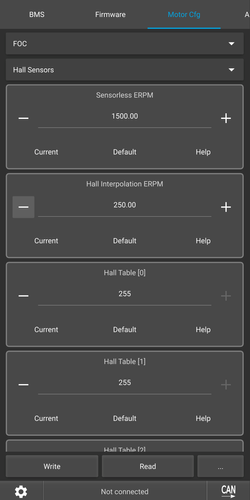
On the Hall Sensors page set the following:
Hall Interpolation ERPM:250.00
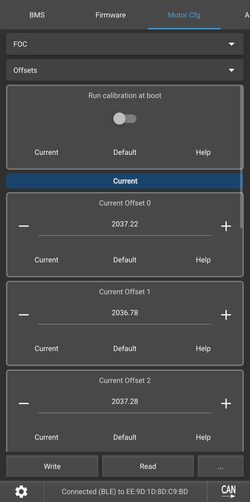
Write the setting to the boardOn the Offsets page set the following:
Run Calibration At Boot:Off*Optional
Turning this off allows the board to boot faster
Write the setting to the board
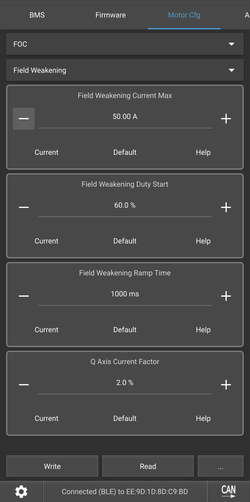
On the Field Weakening page set the following:
Field Weakening Current Max:50.00 A
Field Weakening Duty Start:60.0 %
Field Weakening Ramp Time:1000 ms
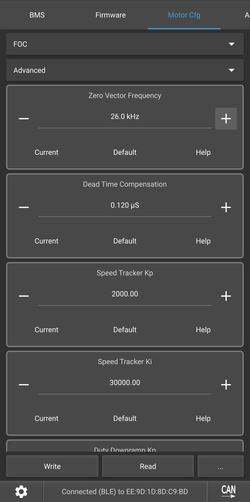
Write the settings to the boardOn the Advanced page set the following:
Zero Vector Frequency:26.0 kHz*
Adjusting this value by steps of0.5 kHzbetween26.0and30.0can help with motor noise and feel
Write the setting to the board
¶ Continue to IMU Setup
Motor Setup completed
Continue on to the IMU Setup Guide